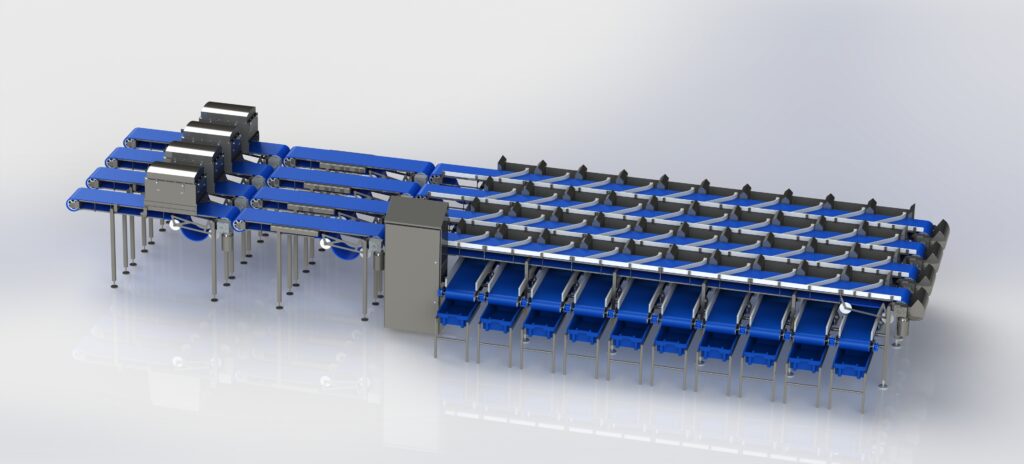

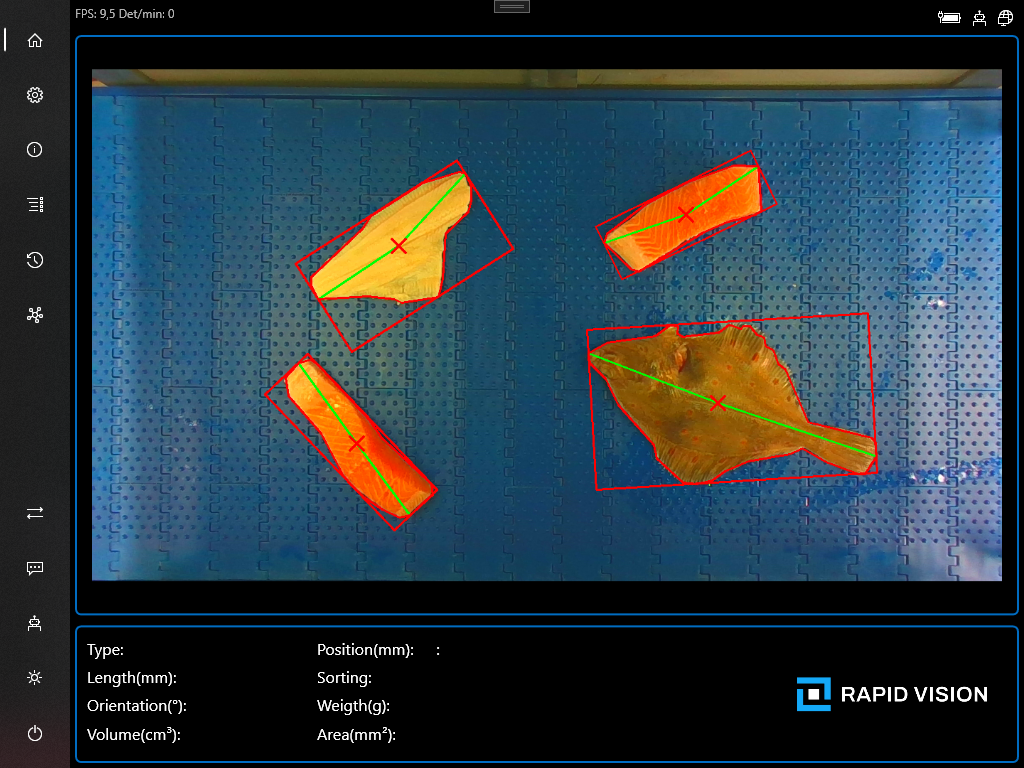
Vision software kan vissen sorteren op soort, lengte of gewicht.
De Vision software kan op basis van soort, lengte of gewicht de vis sorteren. Deze informatie wordt gebruikt om de vis naar de juiste sorteerbak te geleiden. Dankzij de precisie en snelheid van de Grader kunnen grote hoeveelheden vis automatisch en efficiënt worden gesorteerd.
Klik hier voor een video